
Chandrayaan 2
Introduction:
- Chandrayaan 2’s failure to land on the lunar surface was a significant setback for the Indian Space Research Organization (ISRO) and the entire nation. Here’s a historical account of the factors that contributed to the mission’s failure:
Name, Design, Budget, and Weight
The name Chandrayaan means “Travel to Moon” in Sanskrit and most other Indian languages The mission was launched on a Geosynchronous Satellite Launch Vehicle Mark III (GSLV Mk III) M1 with an approximate lift-off mass of 3,850 kg (8,490 lb) from Satish Dhawan Space Centre on Sriharikota Island of Andhra Pradesh. As of June 2019, the mission has an allocated cost of ₹ 9.78 billion (approximately US$141 million which includes ₹ 6 billion for the space segment and ₹ 3.75 billion as launch costs on GSLV Mk III M1. Chandrayaan 2 stack was initially put in an Earth parking orbit of 170 km (110 mi) perigee and 40,400 km (25,100 mi) apogee by the launch vehicle.
Table of Contents
Complex Landing Sequence:
- Chandrayaan 2’s landing sequence involved a complex series of maneuvers to ensure a precise touchdown on the Moon.
- The mission of Chandrayaan 2 included the Vikram lander, which carried the Pragyan rover, and it required a soft landing technique to ensure the safety of the delicate equipment.
Communication Breakdown:
- During the final stages of the descent, when the Vikram lander was just a few kilometers above the lunar surface, the communication link between the lander and the ground control center was lost.
- The exact cause of the communication breakdown is still under investigation, but it was a critical factor that prevented the successful landing.

Navigation and Guidance Challenges:
- Landing on the Moon’s surface requires precise navigation and guidance to avoid hazardous terrain and ensure a safe touchdown.
- The Vikram lander relied on onboard sensors and real-time data analysis to adjust its trajectory and make necessary course corrections.
- The challenges of navigating in the lunar environment, combined with the limited time window for landing, added complexity to the mission.

Complexities of the Lunar Surface:
- The lunar surface is riddled with challenges, such as craters, boulders, and uneven terrains, which pose a risk to a safe landing.
- The selection of a suitable landing site is crucial, and thorough reconnaissance is necessary to avoid potential hazards.
- It’s possible that unexpected surface conditions encountered during the landing attempt contributed to the failure.
Post-Failure Analysis:
- Following the unsuccessful landing, ISRO conducted a detailed analysis to understand the reasons behind Chandrayaan 2 failure.
- The analysis involved studying telemetry data, images, and other mission-related information to identify the specific issues that led to the outcome.

Launch
The launch of Chandrayaan 2 was initially scheduled for 14 July 2019, 21:21 UTC (15 July 2019 at 02:51 IST local time). However, the launch was aborted 56 minutes and 24 seconds before launch due to a technical glitch, so it was rescheduled to 22 July 2019. Unconfirmed reports later cited a leak in the nipple joint of a helium gas bottle as the cause of cancellation.
Finally, Chandrayaan 2 has launched on board the LVM3 M1 launch vehicle on 22 July 2019 at 09:13 UTC (14:43 IST) with a better-than-expected apogee as a result of the cryogenic upper stage being burned to depletion, which later eliminated the need for one of the apogee-raising burns during the geocentric phase of the mission. This also resulted in the saving of around 40 kg of fuel on board the spacecraft.
Immediately after launch, multiple observations of a slow-moving bright object over Australia were made, which could be related to upper-stage venting of residual LOX / LH2 propellant after the main burn.
[Chandrayaan 2] Orbiter
The Chandrayaan 2 orbiter is orbiting the Moon in a polar orbit at an altitude of 100 km (62 mi). It carries eight scientific instruments; two of which are improved versions of those flown on Chandrayaan-1.
The approximate launch of Chandrayaan 2 mass was 2,379 kg (5,245 lb). The Orbiter High-Resolution Camera (OHRC) conducted high-resolution observations of the landing site prior to the separation of the lander from the orbiter. The orbiter’s structure was manufactured by Hindustan Aeronautics Limited and delivered to the ISRO Satellite Centre on 22 June 2015.
- Dimensions: 3.2 × 5.8 × 2.2 m
- Gross lift-off mass: 2,379 kg (5,245 lb)
- Propellant mass: 1,697 kg (3,741 lb)
- Dry mass: 682 kg (1,504 lb)
- Power generation capacity: 1000 watts
- Mission duration: ~ 7.5 years, extended from the planned 1 year owing to the precise launch and mission management, in lunar orbit
[Chandrayaan 2] Vikram Lander
The mission’s lander is called Vikram (Sanskrit: विक्रम, named after cosmic ray scientist Vikram Sarabhai (1919–1971), who is widely regarded as the founder of the Indian space program.
The Vikram lander detached from the orbiter and descended to a low lunar orbit of 30 km × 100 km (19 mi × 62 mi) using its 800 N (180 lbf) liquid main engines.
After checking all of its on-board systems it attempted a soft landing that would have deployed the rover and performed scientific activities for approximately 14 Earth days. Vikram crash-landed during this attempt. The combined mass of the lander and rover was approximately 1,471 kg (3,243 lb).
The preliminary configuration study of the lander was completed in 2013 by the Space Applications Centre (SAC) in Ahmedabad.
The lander’s propulsion system consisted of eight 58 N (13 lbs) thrusters for attitude control and five 800 N (180 lbs) liquid main engines derived from ISRO’s 440 N (99 lbs) liquid apogee motor.
Initially, the lander design employed four main throttle-able liquid engines, but a centrally mounted fixed-thrust engine was added to handle the new requirements of having to orbit the Moon before landing.
The additional engine was expected to mitigate the upward draft of lunar dust during the soft landing.
The four throttle-able engines of the lander were capable of throttling between a range of 40 to 100 percent incrementally in steps of 20%. Vikram was designed to safely land on slopes up to 12°.
Some associated technologies include:
- A high-resolution camera, Laser Altimeter (LASA)
- Lander Hazard Detection Avoidance Camera (LHDAC)
- Lander Position Detection Camera (LPDC)
- Lander Horizontal Velocity Camera (LHVC), an 800 N throttleable liquid main engine
- Attitude thrusters
- Ka-band radio altimeters
- Laser Inertial Reference and Accelerometer Package (LIRAP) and the software needed to run these components.
Engineering models of the lander began undergoing ground and aerial tests in late October 2016, in Challakere in the Chitradurga district of Karnataka. ISRO created roughly 10 craters on the surface to help assess the ability of the lander’s sensors to select a landing site.
- Dimensions: 2.54 m × 2 m × 1.2 m (8 ft 4 in × 6 ft 7 in × 3 ft 11 in)
- Gross lift-off mass: 1,471 kg (3,243 lb)
- Propellant mass: 845 kg (1,863 lb)
- Dry mass: 626 kg (1,380 lb)
- Power generation capability: 650 watts
- Mission duration: ≤14 days (one lunar day)
[Chandrayaan 2] Lose of Vikram
Vikram began its descent at 20:08:03 UTC, 6 September 2019, and was scheduled to land on the Moon at around 20:23 UTC.
The descent and soft-landing were to be performed by the onboard computers on Vikram, with mission control unable to make corrections. The initial descent was considered within mission parameters, passing critical braking procedures as expected, but the lander’s trajectory began to deviate at about 2.1 km (1.3 mi) above the surface.
The final telemetry readings during ISRO’s live-stream show that Vikram’s final vertical velocity was 58 m/s (210 km/h) at 330 m (1,080 ft) above the surface, which a number of experts noted, would have been too fast for the lunar lander to make a successful landing.
Initial reports suggesting a crash were confirmed by ISRO chairman K. Sivan, stating that “it must have been a hard landing”.
Radio transmissions from the lander were tracked during descent by analysts using a 25 m (82 ft) radio telescope owned by the Netherlands Institute for Radio Astronomy.
Analysis of the doppler data suggests that the loss of signal coincided with the lander impacting the lunar surface at a velocity of nearly 50 m/s (180 km/h) (as opposed to an ideal 2 m/s (7.2 km/h) touchdown velocity).
The powered descent was also observed by NASA’s Lunar Reconnaissance Orbiter (LRO) using its Lyman-Alpha Mapping Project instrument to study changes in the lunar exosphere due to exhaust gases from the lander’s engines.
K. Sivan, tasked senior scientist Prem Shanker Goel to head the Failure Analysis Committee to look into the causes of the failure.
Both ISRO and NASA attempted to communicate with the lander for about two weeks before the lunar night set in, while NASA’s LRO flew over on 17 September 2019 and acquired some images of the intended landing zone.
However, the region was near dusk, causing poor lighting for optical imaging. NASA’s LRO images, showing no sight of the lander, were released on 26 September 2019. The LRO flew over again on 14 October 2019 under more favorable lighting conditions but was unable to locate it.
The LRO performed a third flyover on 10 November 2019.
On 16 November 2019, the Failure Analysis Committee released its report to the Space Commission, concluding that the crash was caused by a software glitch.
Phase One of descent from an altitude of 30 km to 7.4 km above the Moon’s surface went as intended with velocity being reduced from 1683 m/s to 146 m/s. Engines of Vikram lander were capable of throttling between range of 40 to 100% only in increments of 20%.
Throttling engines in this gradational manner was insufficient in reducing the velocity responsively and hence velocity during the second phase of descent was more than expected.
Coupled with other control and guidance-related issues this deviation from nominal velocity reduction was beyond the designed parameters of onboard software, causing Vikram to land hard, though it managed to impact relatively near the intended landing site. The complete findings have not been made public.
Vikram’s impact site was located at 70.8810°S 22.7840°E by the LROC team after receiving helpful input from Shanmuga Subramanian, a volunteer from Chennai, Tamil Nadu, who located debris from the spacecraft in pictures released by NASA.
While initially estimated to be within 500 m (1,600 ft) of the intended landing site, best-guess estimates from satellite imagery indicate initial impact about 600 m away. The spacecraft shattered upon impact, with debris scattered over almost two dozen locations in an area spanning kilometres.
The orbiter part of the mission, with eight scientific instruments, remains operational, and will continue its seven-year mission to study the Moon
[Chandrayaan 2] Pragyan Rover
The mission’s rover was called Pragyan (Sanskrit: प्रज्ञान, lit. ’Wisdom’ ) Pronunciation with a mass of 27 kg (60 lb), and would have operated on solar power. The rover was to move on six wheels, traversing 500 m (1,600 ft) on the lunar surface at the rate of 1 cm (0.39 in) per second, perform on-site analyses and send the data to the lander, which would have relayed it to the Mission Control on the Earth.
For navigation, the rover would have used:
- Stereoscopic camera-based 3D vision: two 1 megapixel, monochromatic navcams in front of the rover to provide the ground control team a 3D view of the surrounding terrain, and help in path-planning by generating a digital elevation model of the terrain. IIT Kanpur contributed to the development of the subsystems for light-based map generation and motion planning for the rover.
- Control and motor dynamics: the rover has a rocker-bogie suspension system and six wheels, each driven by independent brushless DC electric motors. Steering is accomplished by differential speed of the wheels or skid steering.
The expected operating time of Pragyan rover was one lunar day, or ~14 Earth days, as its electronics were not designed to endure the frigid lunar night. However, its power system has a solar-powered sleep/wake-up cycle implemented, which could have resulted in longer service time than planned. Two aft wheels of the rover had the ISRO logo and the State Emblem of India embossed on them to leave behind patterned tracks on the lunar surface.
- Dimensions: 0.9 × 0.75 × 0.85 m
- Power: 50 watts
- Travel speed: 1 cm/sec
- Mission duration: ~14 Earth days (one lunar day)
[Chandrayaan 2] Lessons Learned and Improvements:
- The failure of Chandrayaan 2 provided valuable lessons for ISRO and the Indian space program as a whole.
- The post-failure of the Chandrayaan 2 analysis helped identify areas for improvement, such as refining the landing sequence, enhancing communication systems, and optimizing navigation techniques.
- ISRO has since worked on incorporating these lessons and improvements into subsequent missions to mitigate the risks associated with lunar landings.
- It’s important to note that while the precise cause of the failure is still being investigated, the challenges of the lunar landing, communication breakdown, and complexities of the lunar surface
- were significant factors that contributed to Chandrayaan 2’s unsuccessful landing. The mission, however, played a crucial role in expanding our understanding of lunar exploration and has paved the way for future endeavors in India’s space program.
Why Chandrayaan 2 Crashes at the time of landing
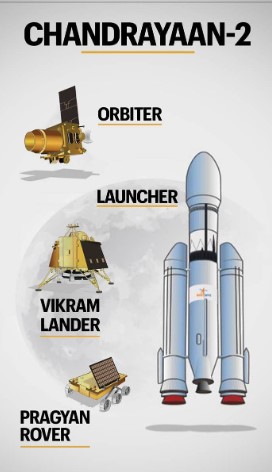
Chandrayaan 2 was the second lunar exploration mission developed by the Indian Space Research Organisation (ISRO), after Chandrayaan-1. Chandrayaan 2 consisted of a lunar orbiter, a lander, and the Pragyan rover, all of which were developed in India. The main scientific objective was to map and study the variations in lunar surface composition, as well as the location and abundance of lunar water. The spacecraft Chandrayaan 2 was launched from the second launch pad at the Satish Dhawan Space Centre in Andhra Pradesh on 22 July 2019 The craft reached the Moon's orbit on 20 August 2019 and began orbital positioning manoeuvres for the landing of the Vikram lander. The lander and the rover were scheduled to land on the near side of the Moon, in the south polar region at a latitude of about 70° south on 6 September 2019. The lander crashed when it deviated from its intended trajectory while attempting to land on 6 September 2019. According to a failure analysis report submitted to ISRO, the crash was caused by a software glitch. ISRO is re-attempting a landing with Chandrayaan-3 which launched on 14 July 2023 and is expected to land near the lunar south pole region on 23 August 2023.
Chandrayaan 1 Introduction:
Chandrayaan-1, an orbiter, was launched in 2008, and the mission lasted less than a year. The Chandrayaan-2 mission lifted off successfully on July 22, 2019, and the spacecraft successfully entered orbit around the moon.
Coming Soon Complete Info About Chandrayaan 1!
Pingback: 21. Chandrayaan 1: Unraveling Mysteries and Paving the Way for Ultimate Future Space Exploration - Interestopedia
Pingback: 23. Chandrayaan 1 to Chandrayaan 3: Unveiling the Ultimate Mysteries of Space: Chandrayaan 1's Groundbreaking Discoveries That Will Leave You Breathless/Chandrayaan 1 to Chandrayaan 3: Unveiling India's Journey to Conquer the Moon. - Interestope